Nano Scratch Testeur :
NST³




-

-

-

- +6
- Mesure de l'adhérence du revêtement et de la résistance aux rayures
- Image panoramique complète synchronisée avec tous les autres signaux tels que la profondeur de pénétration et la force de frottement
- Idéal pour les couches minces d'une épaisseur inférieure à 1.000 nm
- Mesure de la force jusqu'à 1.000 mN
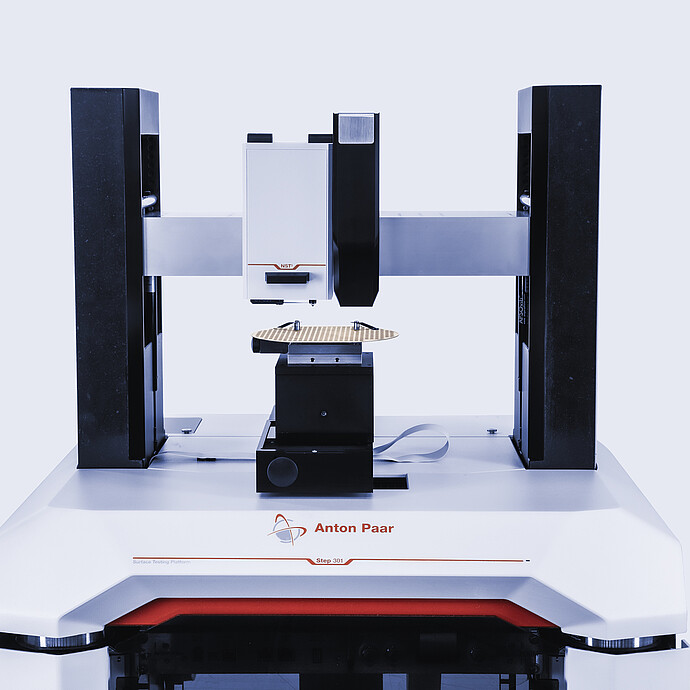
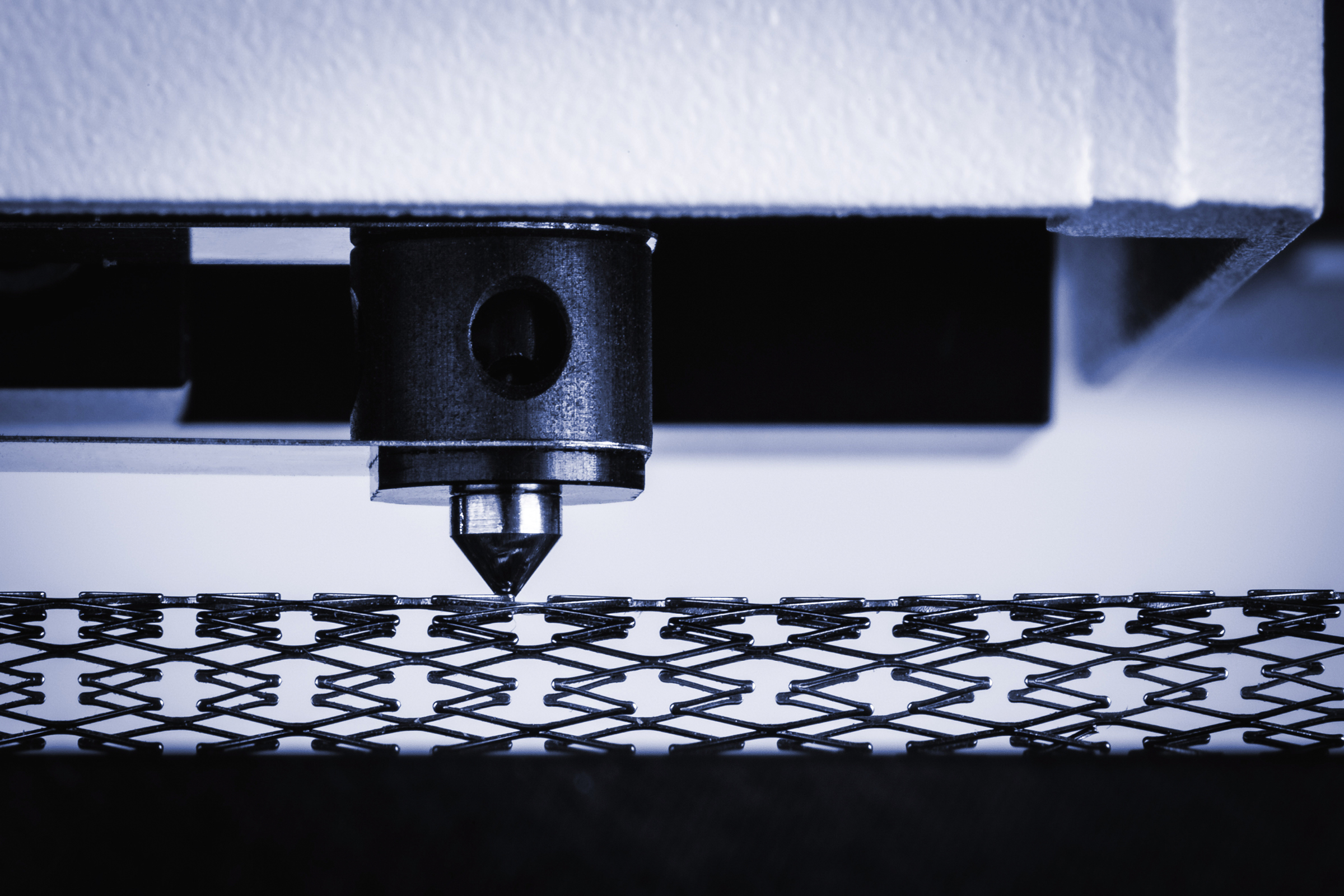
Le nano-scratch testeur (NST3) est particulièrement adapté pour caractériser la résistance à la rayure et la perte d’adhérence des films et revêtements minces d'épaisseur inférieure à 1000 nm. Analysez des revêtements organiques et inorganiques ainsi que les matériaux mous et durs. La conception exclusive de la tête de mesure nanoscratch comprend deux capteurs pour mesurer la force et la profondeur ainsi qu’un actionneur piezoélectrique performant – obtenez des résultats en quelques millisecondes, ainsi qu’une grande précision et une grande flexibilité.
Combinez la tête du NST3 avec une autre tête de mesure de rayure ou d'indentation pour couvrir entièrement la gamme nano, micro et macro. La polyvalence de la plateforme Step vous permet même d'ajouter un AFM pour étudier la topographie de la surface.
Caractéristiques principales
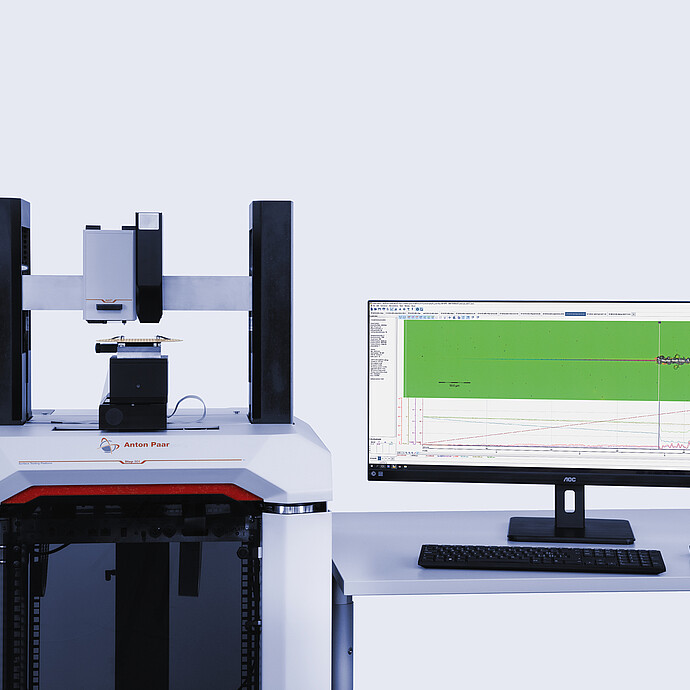
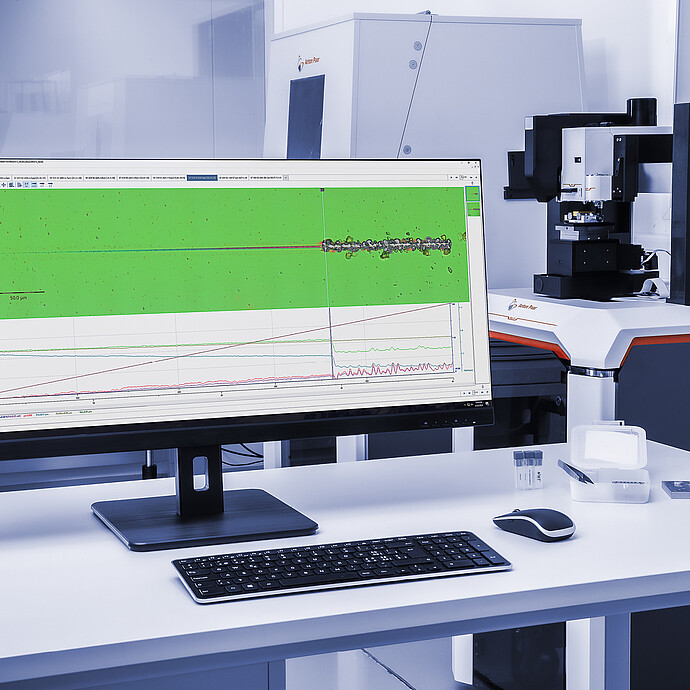
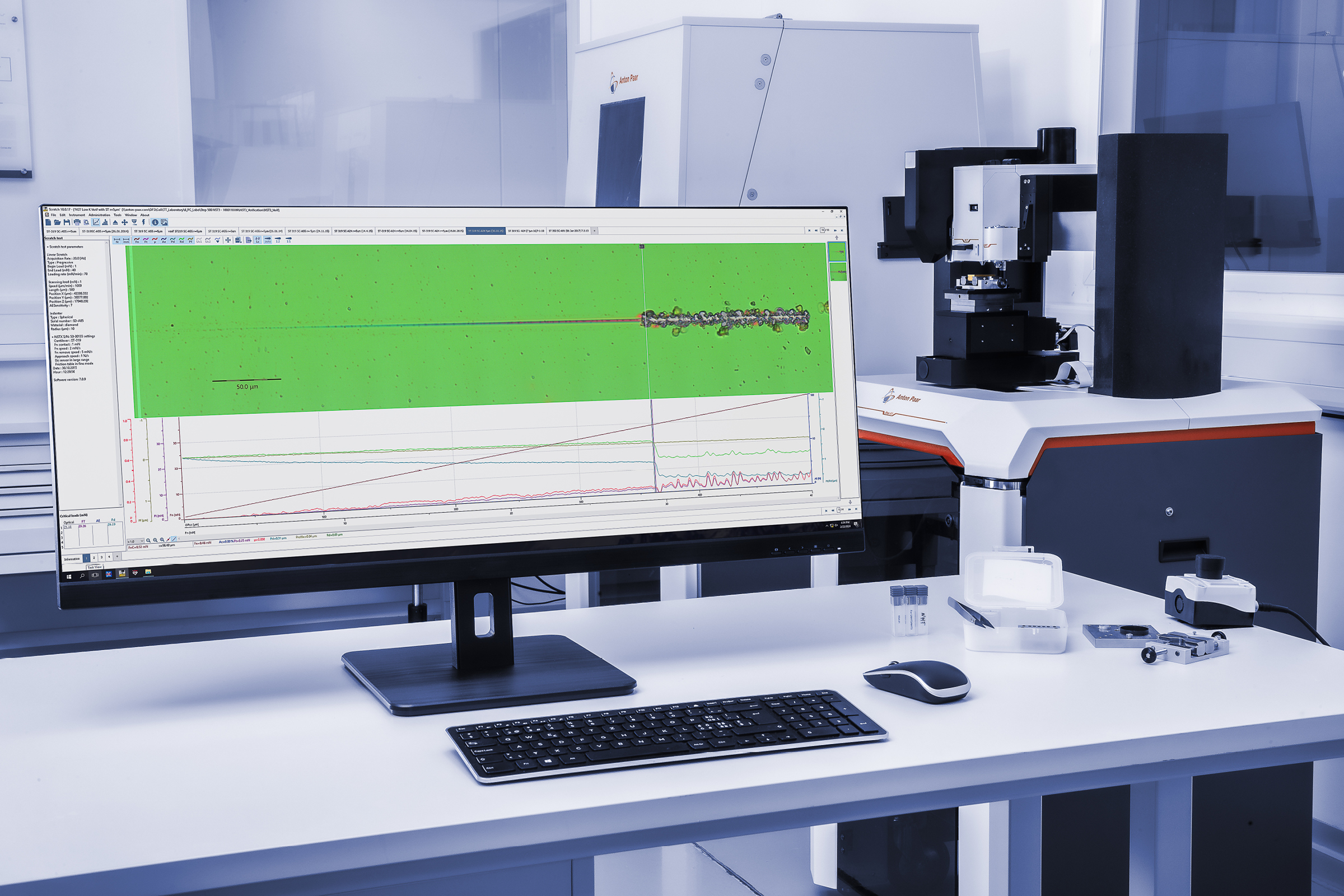
Un panorama entièrement synchronisé pour une analyse n’importe quand et n’importe où
Cette fonction unique de notre Nano Scratch Testeur synchronise automatiquement l’image panoramique complète de la rayure avec une mise au point parfaite, et les données de rayure provenant de l’ensemble des capteurs. Effectuez à tout moment une analyse des charges critiques à partir de l’observation du panorama et des enregistrements de signaux. Anton Paar est le détenteur exclusif de la technique du panorama synchronisé (brevet américain 8261600 et brevet européen EP 2065695).
Réponse rapide aux petites forces
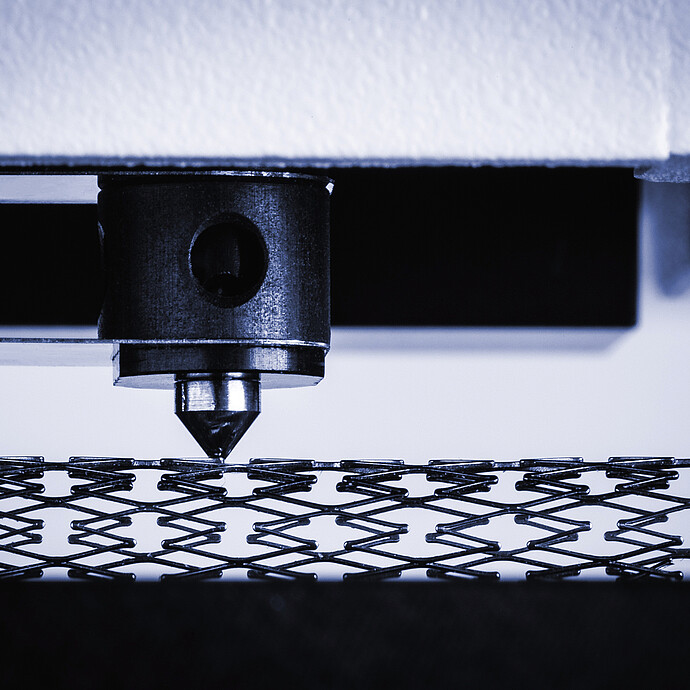
Le nano-scratch testeur incorpore un cantilever double lames pour l'application de la charge couplé à un actionneur piézoélectrique pour fournir une réponse ultra-rapide à la charge appliquée. Ce concept corrige également le résultat des déviations provoquées par tout événement se produisant pendant la rayure (par exemple l'apparition de fissures et de défaillances, de défauts ou d'échantillons non plats).

appliquez la force précise que vous souhaitez
La boucle d’asservissement électronique de la force normale permet des essais de nano-rayure encore plus précis (résolution de charge normale de 0,01 µN et bruit de fond de 0,1 µNm). Le NST³ inclut un capteur réel pour la mesure de force qui renvoie directement à l'actionneur de force normale. Cela garantit des essais de rayure reproductibles, même si vous examinez des géométries de surface plus complexes telles que des échantillons non parallèles, rugueux ou courbés.
Études de recouvrance élastique : mesures de la profondeur de pénétration réelle
Le nano-scratch testeur NST³ est doté d’un capteur de déplacement réel pour contrôler le mouvement vertical de l’indenteur. La méthode unique de pré-scan et post-scan permet d'obtenir la profondeur réelle : les propriétés élastiques, plastiques et viscoélastiques des matériaux peuvent donc être évaluées. Cette méthode fait appel à un pré-scan pour enregistrer le profil de surface (forme, ondulation et rugosité) de l’échantillon avant l’essai de résistance à la rayure. Le NST³ corrige la profondeur de l’indenteur au moment de la rayure (profondeur de pénétration) et après la rayure (profondeur résiduelle) à l’aide du profil de surface.
Mode multi-post-scan pour mesurer le comportement visqueux suite à une rayure
Après une rayure, il est possible de définir plusieurs mesures post-scan dans le temps pour mesurer l’évolution de la profondeur résiduelle. Cette nouvelle analyse vous permettra de mieux comprendre les déformations supportées par votre échantillon et les temps de relaxation
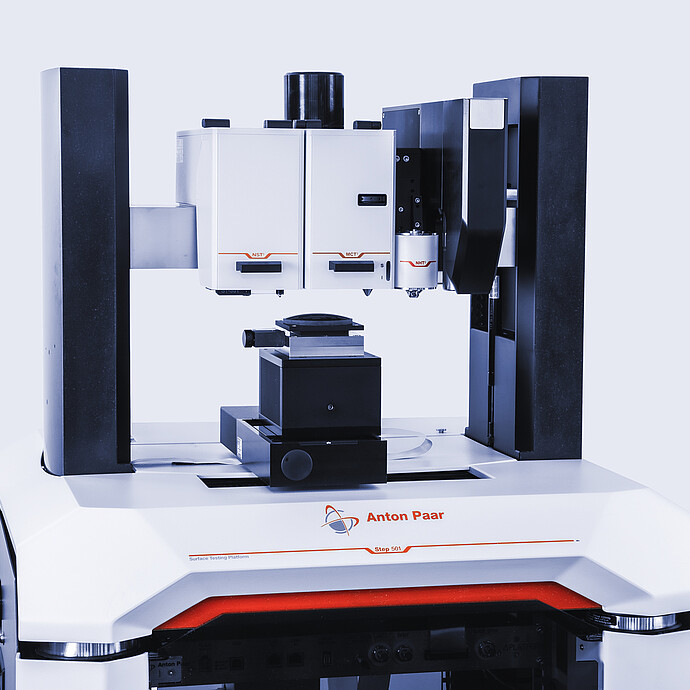
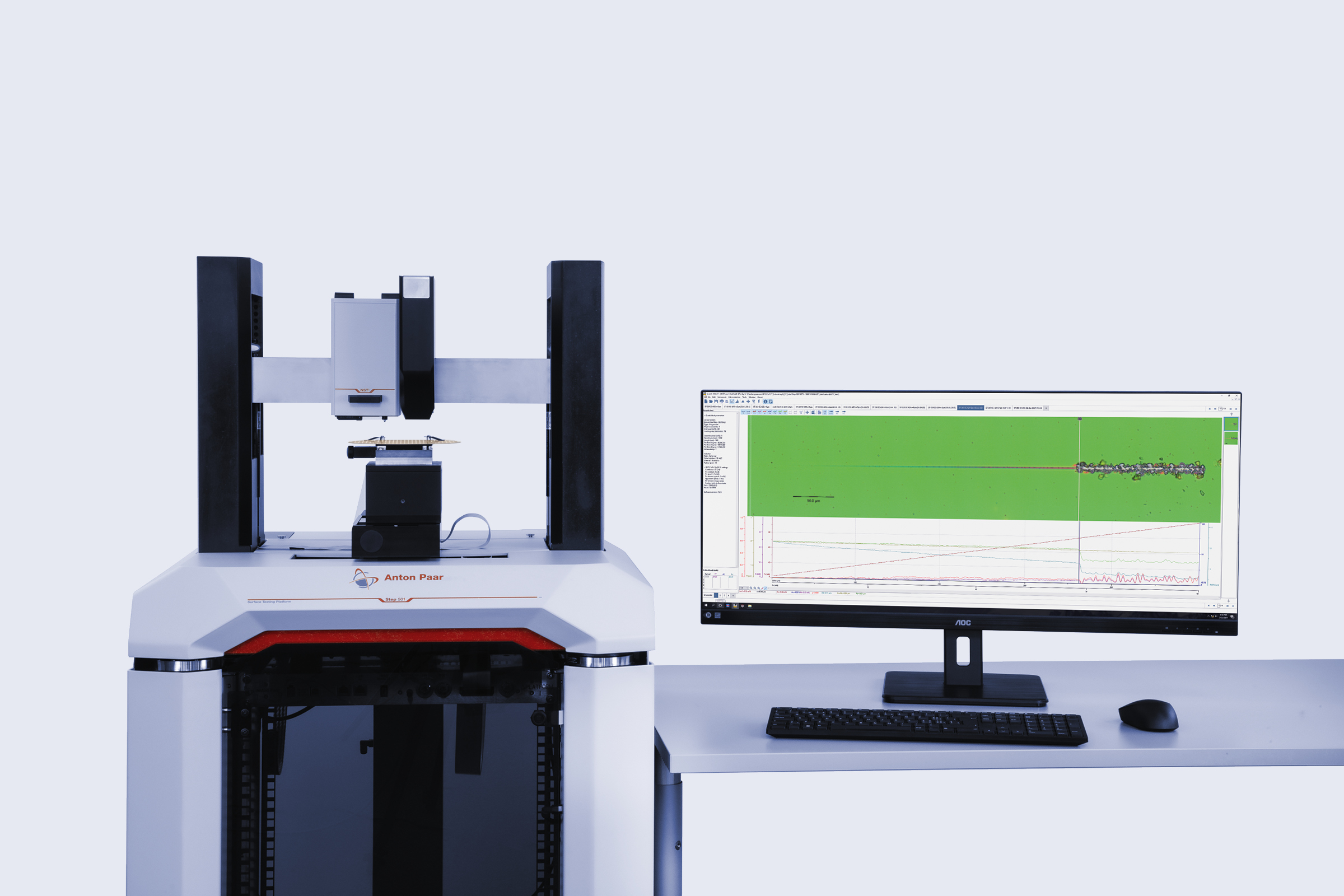
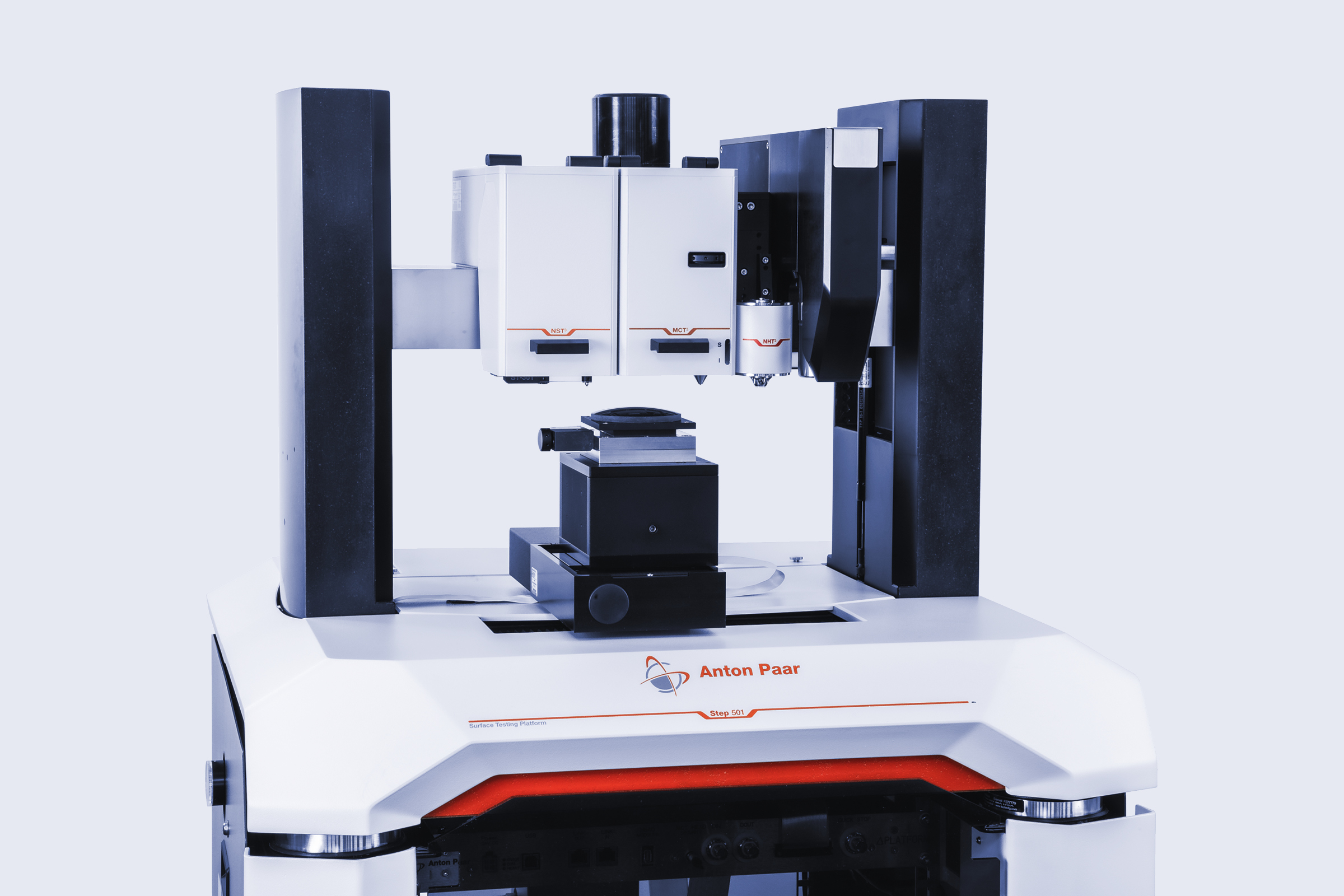
Polyvalence accrue grâce à la plateforme Step
La plateforme Step est votre solution tout-en-un pour les essais de caractérisation mécanique des surfaces. Que vous souhaitiez effectuer exclusivement des tests de rayures ou améliorer les résultats avec des mesures d'indentation et d'AFM, la plateforme Step offre toujours la meilleure solution en termes de modularité, de stabilité et d'isolation phonique.
Spécifications
| Force maximale [mN] | 1000 |
| Résolution en force [µN] | 0,01 |
| Niveau de bruit de charge [valeur efficace] [μN] | 0,1 |
| Taux de chargement [N/min] | Jusqu'à 100 |
| Force de friction maximale [mN] | 1.000 |
| Résolution en force de friction [μN] | 1 |
| Profondeur maximale [μm] | 600 |
| Résolution en profondeur [nm] | 0,1 |
| Niveau de bruit en profondeur [valeur efficace] [nm] | 1,5 |
| Fréquence d’acquisition des données [kHz] | 192 |
| Vitesse de rayure [mm/min] | 0,1 à 600 |
Normes
ASTM
Service certifié Anton Paar
- Plus de 350 experts techniques certifiés par les fabricants dans le monde
- Assistance qualifiée dans votre langue locale
- Protection de votre investissement tout au long de son cycle de vie
- 3 ans de garantie
Documents
-
Brochure | Surface Caractérisation Brochures
-
Adhesion and mechanical properties of anti-reflective coatings Rapports d'application
-
Adhesion of passivation layers in semiconductor industry by nanoscratch test Rapports d'application
-
Applications of indentation and scratch in automotive industry Rapports d'application
-
Applications of scratch testing in polymer industry Rapports d'application
-
Biomedical applications 2: Adhesion and scratch resistance by scratch testing Rapports d'application
-
Characterization of hard coatings - Part I: DLC coatings Rapports d'application
-
E-Book - A Practical Guide for Great Building Materials Rapports d'application
-
Electric contact resistance (ECR) by indentation, scratch and tribology Rapports d'application
-
Mechanical surface characterization of smartphone displays Rapports d'application
Produits similaires



Produits complémentaires
Si vous ne trouvez pas l’article dont vous avez besoin, contactez votre représentant commercial Anton Paar.
Accessoire pour les platesformes Step :
microscope à force atomique (AFM)
- Solution AFM polyvalente pour diverses applications scientifiques et industrielles
- Capacités d'imagerie et d'analyse offrant des informations sur les surfaces à l'échelle nanométrique
- Interaction non destructive avec les échantillons

Accessoire pour Scratch Testeurs :
module de friction
- Évaluation du comportement au frottement du matériau
- Outil complémentaire dans l'évaluation des défauts d'adhérence
- Combine les essais de rayures et de tribologie